
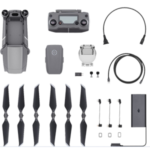
 کیت اماده پرواز
کیت اماده پرواز
 کیت ساختنی
کیت ساختنی
 کیت بدنه خالی
کیت بدنه خالی
 موتور الکتریک
موتور الکتریک
 موتور سوختی
موتور سوختی
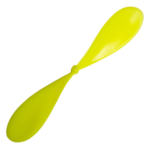
 ملخ الکتریک
ملخ الکتریک
 ملخ سوختی
ملخ سوختی
 ملخ هواپیمای کشی
ملخ هواپیمای کشی
 سوخت الکلی
سوخت الکلی
 سوخت بنزینی
سوخت بنزینی
 اسپید کنترل
اسپید کنترل
 رادیو کنترل
رادیو کنترل
 باتری هواپیما و شارژر
باتری هواپیما و شارژر
 سروو موتور
سروو موتور
 سیم و کابل
سیم و کابل
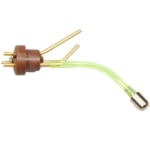
 کانکتور و سوکت
کانکتور و سوکت
 باک سوخت
باک سوخت
 شیلنگ سوخت
شیلنگ سوخت
 متعلقات باک
متعلقات باک
 کنسول شبیه ساز
کنسول شبیه ساز
 نرم افزار شبیه ساز
نرم افزار شبیه ساز
 کابل رابط
کابل رابط
 بالسا، تخته سه لایی و فوم
بالسا، تخته سه لایی و فوم
 کاور حرارتی و برچسب
کاور حرارتی و برچسب
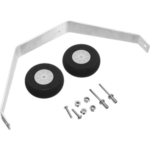 چرخ، ارابه فرود و دوبرو
چرخ، ارابه فرود و دوبرو
 اسپینر و کوپلینگ
اسپینر و کوپلینگ
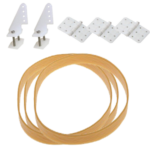 لولا، شیپوری و کش بال
لولا، شیپوری و کش بال
 لینک، سرلینک و استاپرلینک
لینک، سرلینک و استاپرلینک
 لوله و صفحات کربن
لوله و صفحات کربن
 چسب
چسب
 کش FAI
کش FAI
 شفت موتور
شفت موتور
 تراست برینگ
تراست برینگ
 تیشو و ایزودوپ
تیشو و ایزودوپ
 چرخ و ارابه فرود
چرخ و ارابه فرود
 شارژر کوک کش
شارژر کوک کش
 برش، خمکاری و سوراخکاری
برش، خمکاری و سوراخکاری
 پرداخت و تزئین بدنه
پرداخت و تزئین بدنه
 طول، زاویه و ضخامت
طول، زاویه و ضخامت
 سایر ابزار ها
سایر ابزار ها
 راه اندازی موتور سوختی
راه اندازی موتور سوختی
 مونتاژ و لحیم کاری
مونتاژ و لحیم کاری
 تست و اندازه گیری
تست و اندازه گیری
 نظم دهنده، نظافت و ایمنی
نظم دهنده، نظافت و ایمنی

 هلیکوپتر اسباب بازی
هلیکوپتر اسباب بازی
 قطعات یدکی
قطعات یدکی
 هلیکوپتر الکتریک
هلیکوپتر الکتریک
 قطعات یدکی
قطعات یدکی
 هلیکوپتر سوختی
هلیکوپتر سوختی
 نرم افزار شبیه ساز
نرم افزار شبیه ساز

 کوادکوپتر اسباب بازی
کوادکوپتر اسباب بازی
 قطعات یدکی
قطعات یدکی
 کوادکوپتر حرفه ای
کوادکوپتر حرفه ای
 قطعات یدکی
قطعات یدکی

 ماشین کنترلی آنرود
ماشین کنترلی آنرود
 ماشین آلات راهسازی
ماشین آلات راهسازی
 سایر انواع ماشین
سایر انواع ماشین
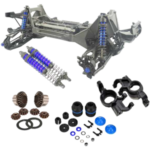
 قطعات یدکی
قطعات یدکی
 ماشین کنترلی آنرود
ماشین کنترلی آنرود
 ماشین کنترلی آفرود
ماشین کنترلی آفرود
 قطعات یدکی
قطعات یدکی
 ماشین کنترلی آنرود
ماشین کنترلی آنرود
 ماشین کنترلی آفرود
ماشین کنترلی آفرود
 قطعات یدکی
قطعات یدکی
 سوخت نیترو
سوخت نیترو


















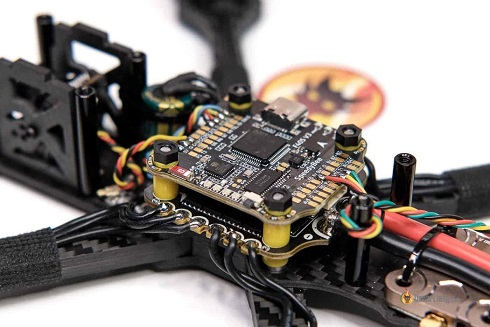
مولتی روتورها (مانند کوادکوپترها و هگزاکوپترها) پرندههای بدون سرنشینی هستند که از چندین روتور برای ایجاد نیروی بالابر و کنترل پرواز استفاده میکنند. سیستم فلایت کنترل (Flight Control System یا FCU) مغز متفکر این پرندههاست و نقش بسیار حیاتی در ایمنی، پایداری و عملکرد آنها ایفا میکند. در واقع، بدون یک سیستم فلایت کنترل کارآمد، پرواز یک مولتی روتور غیرممکن یا بسیار خطرناک خواهد بود. در ادامه به بررسی نقشهای کلیدی فلایت کنترل در مولتی روتورها میپردازیم.
کنترل پایداری و تعادل
مولتی روتورها به طور ذاتی ناپایدار هستند، یعنی هرگونه اختلال کوچک میتواند باعث از دست رفتن تعادل و سقوط آنها شود. فلایت کنترل با استفاده از حسگرهای مختلف مانند شتابسنج (Accelerometer)، ژیروسکوپ (Gyroscope) و قطبنما (Magnetometer)، به طور مداوم موقعیت و جهت پرنده را در فضا رصد میکند. با پردازش اطلاعات دریافتی از این حسگرها، الگوریتمهای کنترل در فلایت کنترل اقدامات اصلاحی لازم را برای حفظ پایداری و تعادل مولتی روتور انجام میدهند. این اقدامات شامل تنظیم سرعت و جهت چرخش هر یک از موتورها است.

کنترل ارتفاع و موقعیت
فلایت کنترل با استفاده از حسگرهای ارتفاع سنج (Barometer) و GPS (در صورت وجود)، ارتفاع و موقعیت مولتی روتور را در فضا کنترل میکند. این سیستم به خلبان اجازه میدهد تا ارتفاع و موقعیت پرنده را با دقت بالا کنترل کند یا حتی به مولتی روتور دستور پرواز به نقاط از پیش تعیین شده را بدهد.
کنترل جهت و حرکت
فلایت کنترل به خلبان اجازه میدهد تا جهت و حرکت مولتی روتور را با استفاده از فرمانهای ورودی (مانند فرمانهای رادیویی یا دستورات از طریق یک رابط دیگر) کنترل کند. این سیستم با تغییر سرعت و جهت چرخش موتورها، به مولتی روتور اجازه میدهد تا در تمام جهتها حرکت کند و چرخش داشته باشد.
حفاظت از پرنده
فلایت کنترل دارای ویژگیهای ایمنی مختلفی است که از پرنده در برابر خطرات محافظت میکند. این ویژگیها شامل حداکثر محدودیتهای سرعت، ارتفاع، زاویه تمایل و سیستم بازگشت به خانه (Return-to-Home یا RTH) میباشد.

ثبات و قابلیت اطمینان
سیستم فلایت کنترل از طریق پایش مداوم عملکرد مولتی روتور و داده های حسگرها، توانایی تشخیص و رفع خطاهای سیستم را داراست. این موضوع به ثبات و قابلیت اطمینان پرواز کمک شایانی میکند. فلایت کنترل نقش بسیار اساسی در عملکرد و ایمنی مولتی روتورها ایفا میکند. این سیستم با پردازش دادههای دریافتی از حسگرها و اجرای الگوریتمهای کنترل، پایداری، تعادل، ارتفاع، موقعیت، جهت و حفاظت پرنده را تامین میکند. پیشرفتهای ادامهدار در زمینه فلایت کنترل به افزایش کارایی، ایمنی و قابلیتهای مولتی روتورها منجر شده است.



 کیت هواپیمای مدل
کیت هواپیمای مدل کیت آماده پرواز
کیت آماده پرواز موتور هواپیما
موتور هواپیما ملخ هواپیما
ملخ هواپیما رادیو کنترل
رادیو کنترل سیم و کابل
سیم و کابل کانکتور و سوکت
کانکتور و سوکت سوخت هواپیما
سوخت هواپیما باک سوخت
باک سوخت شیلنگ سوخت
شیلنگ سوخت لوازم ساخت بدنه هواپیما
لوازم ساخت بدنه هواپیما چرخ، ارابه فرود و دوبرو
چرخ، ارابه فرود و دوبرو انواع چسب
انواع چسب انواع پیچ و مهره
انواع پیچ و مهره لوازم هواپیمای کشی
لوازم هواپیمای کشی شبیه ساز پرواز هواپیما
شبیه ساز پرواز هواپیما تست و اندازه گیری
تست و اندازه گیری هلیکوپتر کنترلی
هلیکوپتر کنترلی