
 کیت اماده پرواز
کیت اماده پرواز
 کیت ساختنی
کیت ساختنی
 کیت بدنه خالی
کیت بدنه خالی
 موتور الکتریک
موتور الکتریک
 موتور سوختی
موتور سوختی
 ملخ الکتریک
ملخ الکتریک
 ملخ سوختی
ملخ سوختی
 ملخ هواپیمای کشی
ملخ هواپیمای کشی
 سوخت الکلی
سوخت الکلی
 سوخت بنزینی
سوخت بنزینی
 اسپید کنترل
اسپید کنترل
 رادیو کنترل
رادیو کنترل
 باتری هواپیما و شارژر
باتری هواپیما و شارژر
 سروو موتور
سروو موتور
 سیم و کابل
سیم و کابل
 کانکتور و سوکت
کانکتور و سوکت
 باک سوخت
باک سوخت
 شیلنگ سوخت
شیلنگ سوخت
 متعلقات باک
متعلقات باک
 کنسول شبیه ساز
کنسول شبیه ساز
 نرم افزار شبیه ساز
نرم افزار شبیه ساز
 کابل رابط
کابل رابط
 بالسا، تخته سه لایی و فوم
بالسا، تخته سه لایی و فوم
 کاور حرارتی و برچسب
کاور حرارتی و برچسب
 چرخ، ارابه فرود و دوبرو
چرخ، ارابه فرود و دوبرو
 اسپینر و کوپلینگ
اسپینر و کوپلینگ
 لولا، شیپوری و کش بال
لولا، شیپوری و کش بال
 لینک، سرلینک و استاپرلینک
لینک، سرلینک و استاپرلینک
 لوله و صفحات کربن
لوله و صفحات کربن
 چسب
چسب
 کش FAI
کش FAI
 شفت موتور
شفت موتور
 تراست برینگ
تراست برینگ
 تیشو و ایزودوپ
تیشو و ایزودوپ
 چرخ و ارابه فرود
چرخ و ارابه فرود
 شارژر کوک کش
شارژر کوک کش
 برش، خمکاری و سوراخکاری
برش، خمکاری و سوراخکاری
 پرداخت و تزئین بدنه
پرداخت و تزئین بدنه
 طول، زاویه و ضخامت
طول، زاویه و ضخامت
 سایر ابزار ها
سایر ابزار ها
 راه اندازی موتور سوختی
راه اندازی موتور سوختی
 مونتاژ و لحیم کاری
مونتاژ و لحیم کاری
 تست و اندازه گیری
تست و اندازه گیری
 نظم دهنده، نظافت و ایمنی
نظم دهنده، نظافت و ایمنی

 هلیکوپتر اسباب بازی
هلیکوپتر اسباب بازی
 قطعات یدکی
قطعات یدکی
 هلیکوپتر الکتریک
هلیکوپتر الکتریک
 قطعات یدکی
قطعات یدکی
 هلیکوپتر سوختی
هلیکوپتر سوختی
 نرم افزار شبیه ساز
نرم افزار شبیه ساز

 کوادکوپتر اسباب بازی
کوادکوپتر اسباب بازی
 قطعات یدکی
قطعات یدکی
 کوادکوپتر حرفه ای
کوادکوپتر حرفه ای
 قطعات یدکی
قطعات یدکی

 ماشین کنترلی آنرود
ماشین کنترلی آنرود
 ماشین آلات راهسازی
ماشین آلات راهسازی
 سایر انواع ماشین
سایر انواع ماشین
 قطعات یدکی
قطعات یدکی
 ماشین کنترلی آنرود
ماشین کنترلی آنرود
 ماشین کنترلی آفرود
ماشین کنترلی آفرود
 قطعات یدکی
قطعات یدکی
 ماشین کنترلی آنرود
ماشین کنترلی آنرود
 ماشین کنترلی آفرود
ماشین کنترلی آفرود
 قطعات یدکی
قطعات یدکی
 سوخت نیترو
سوخت نیترو

















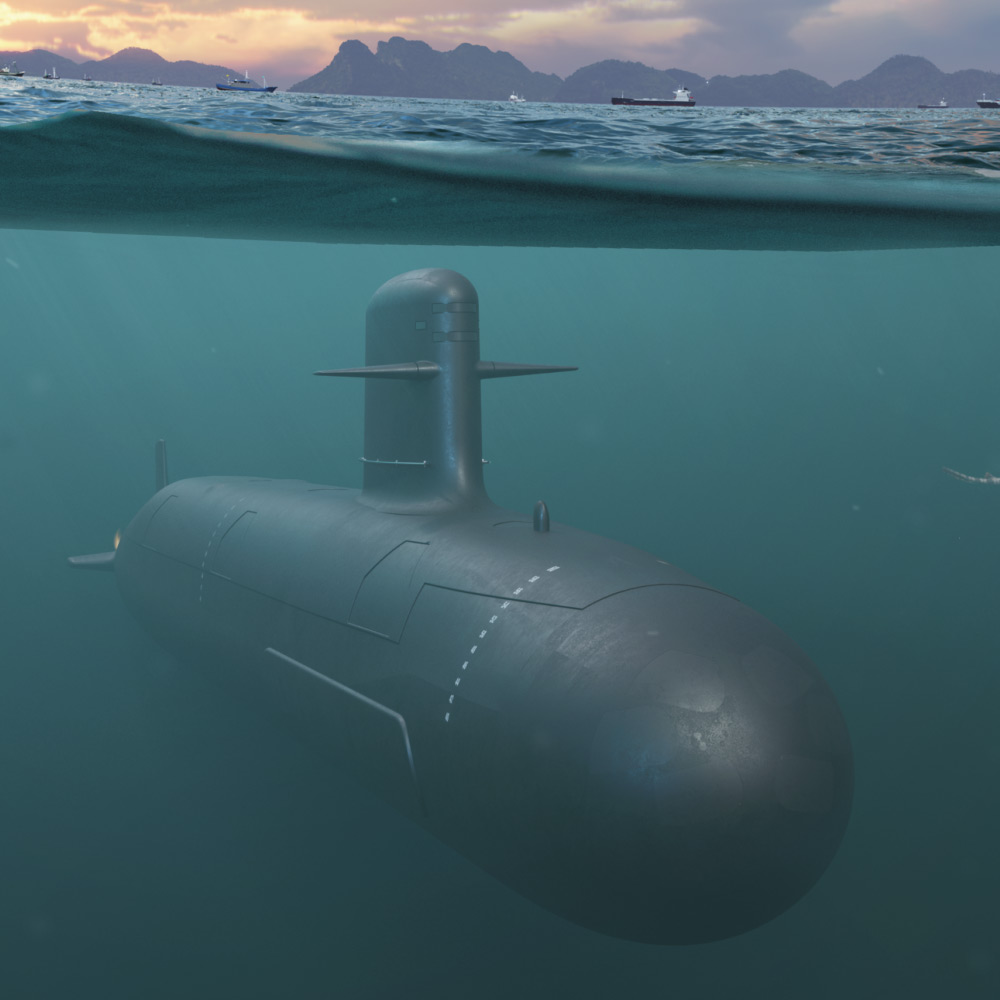
زیردریاییها، بهعنوان شناورهایی منحصربهفرد، توانایی حرکت در زیر آب را مدیون سیستمی پیچیده و دقیق هستند که به آن مکانیسم شناوری گفته میشود. این مکانیسم، با بهرهگیری از قوانین فیزیکی و اجزای مهندسیشده، امکان غوطهوری، حرکت در عمقهای مختلف و صعود دوباره به سطح را برای زیردریایی فراهم میکند. مکانیسم شناوری، سیستمی پیچیده و حیاتی برای عملکرد زیردریاییها است. این مکانیسم، با بهرهگیری از قوانین فیزیکی و اجزای مهندسیشده، امکان غوطهوری، حرکت در عمقهای مختلف و صعود دوباره به سطح را برای زیردریایی فراهم میکند. پیشرفتهای مستمر در این زمینه، به بهبود کارایی، ایمنی و قابلیتهای زیردریاییها کمک میکند. این مقاله به بررسی اصول حاکم بر این مکانیسم حیاتی و اجزای اصلی تشکیلدهنده آن میپردازد.

اصول اساسی شناوری در زیردریایی
مکانیسم شناوری زیردریایی بر پایه دو اصل مهم فیزیکی استوار است:
-
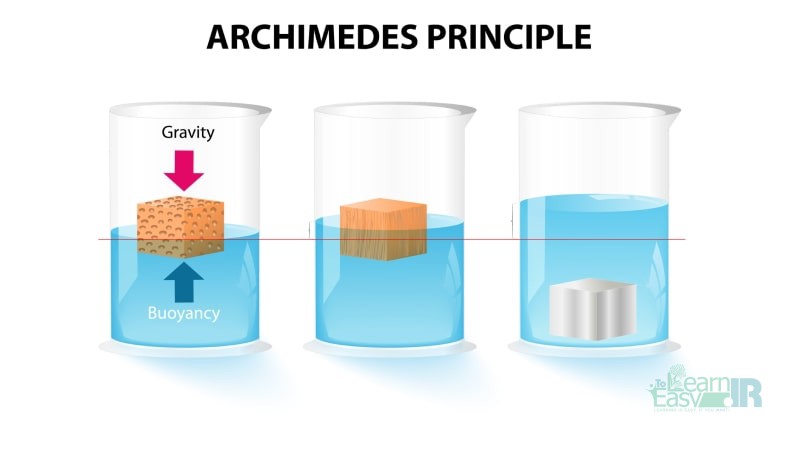
قانون ارشمیدس: این قانون بیان میکند که نیروی شناوری وارد بر یک جسم غوطهور در سیال، برابر با وزن سیال جابهجا شده توسط آن جسم است. به عبارت دیگر، اگر وزن جسم از وزن سیال جابهجا شده بیشتر باشد، جسم غرق میشود، و اگر وزن جسم کمتر باشد، جسم شناور میماند. برای زیردریایی، این به معنای آن است که وزن آب جابهجا شده توسط زیردریایی تعیین میکند که آیا زیردریایی شناور خواهد ماند یا غرق میشود.
-
اصل تغییر چگالی: چگالی یک جسم، جرم آن به ازای واحد حجم است. برای غوطهوری یا صعود، زیردریایی باید چگالی خود را نسبت به آب اطراف تغییر دهد. از آنجایی که حجم زیردریایی تقریباً ثابت است، تغییر چگالی با تغییر جرم زیردریایی انجام میشود. این کار با استفاده از مخازن بالاست صورت میگیرد که در ادامه به آن پرداخته خواهد شد.
اجزای اصلی مکانیسم شناوری در زیردریایی
مکانیسم شناوری زیردریایی از اجزای مختلفی تشکیل شده است که با همکاری یکدیگر، کنترل دقیق شناوری را امکانپذیر میسازند:
-
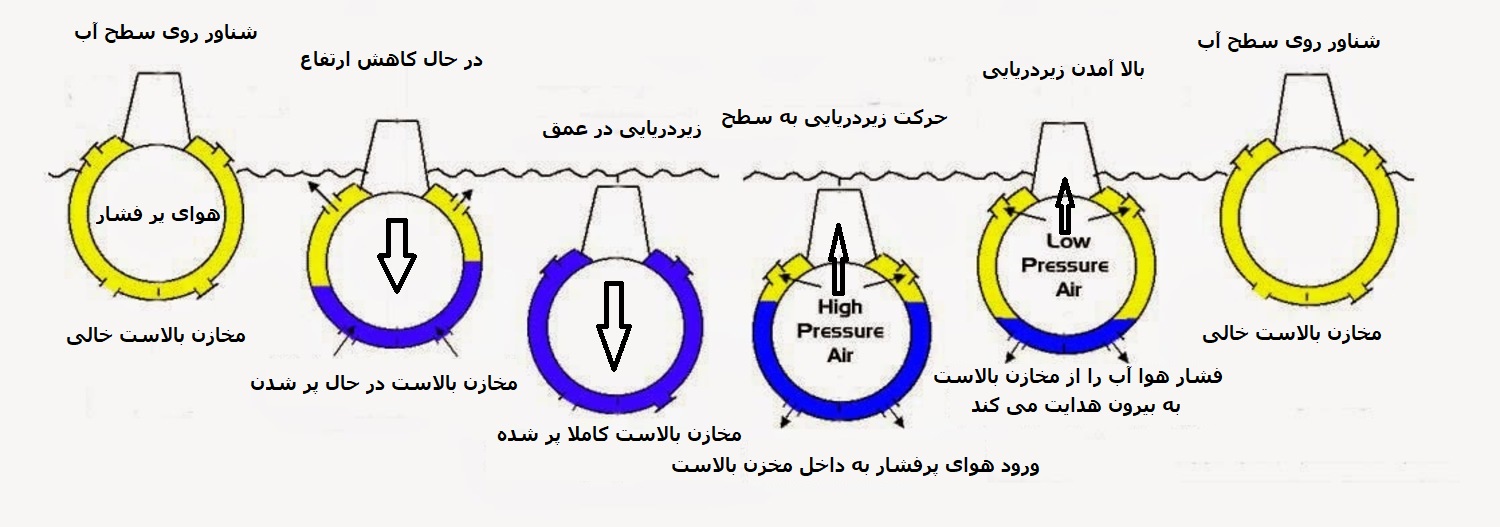
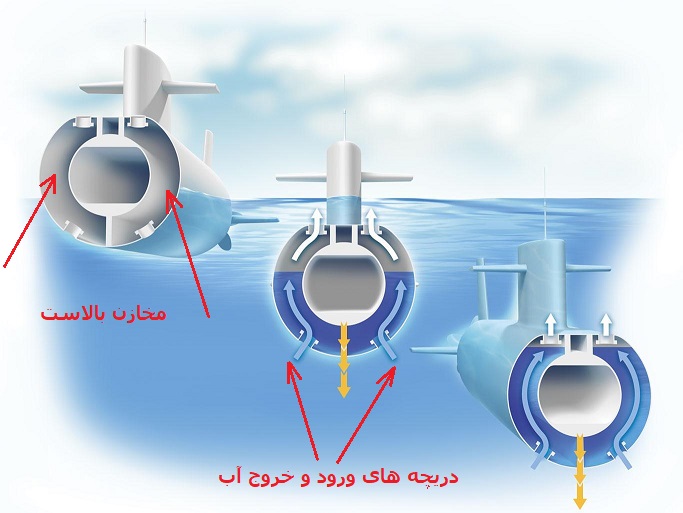
مخازن بالاست (Ballast Tanks): این مخازن، هسته اصلی سیستم شناوری زیردریایی هستند. مخازن بالاست، فضاهایی هستند که در داخل بدنه زیردریایی تعبیه شدهاند و امکان پر و خالی کردن آنها از آب وجود دارد. با پر کردن مخازن بالاست از آب، وزن زیردریایی افزایش مییابد و چگالی آن نسبت به آب بیشتر میشود، در نتیجه زیردریایی غرق میشود. برعکس، با تخلیه آب از مخازن بالاست، وزن زیردریایی کاهش مییابد و چگالی آن نسبت به آب کمتر میشود، در نتیجه زیردریایی به سطح صعود میکند. مخازن بالاست معمولاً به دو دسته اصلی تقسیم میشوند:
- مخازن بالاست اصلی (Main Ballast Tanks): این مخازن بزرگترین بخش از سیستم بالاست را تشکیل میدهند و برای غوطهوری و صعود سریع استفاده میشوند.
- مخازن بالاست کمکی (Auxiliary Ballast Tanks): این مخازن کوچکتر هستند و برای تنظیم دقیق عمق و حفظ تعادل زیردریایی در عمقهای مختلف استفاده میشوند.
-
دریچهها و پمپها: دریچهها و پمپها، نقش حیاتی در کنترل جریان آب به داخل و خارج مخازن بالاست ایفا میکنند. دریچهها، امکان ورود و خروج آب به مخازن را فراهم میکنند، در حالی که پمپها، برای تسریع فرآیند تخلیه آب از مخازن و غلبه بر فشار آب در اعماق زیاد استفاده میشوند.
-
سیستم کنترل عمق (Depth Control System): این سیستم، به زیردریایی کمک میکند تا در عمق مورد نظر باقی بماند و از صعود یا غوطهوری ناخواسته جلوگیری کند. سیستم کنترل عمق معمولاً از سنسورهای فشار برای اندازهگیری عمق، یک کامپیوتر کنترل برای پردازش اطلاعات و سطوح کنترلی (مانند بالهها و سکان) برای تنظیم زاویه زیردریایی نسبت به جریان آب استفاده میکند.
-
هیدرودینامیک و سطوح کنترل: همانطور که اشاره شد، بالهها و سکان نقش مهمی در کنترل حرکت زیردریایی در آب دارند. با تنظیم زاویه این سطوح کنترلی، میتوان نیروی هیدرودینامیکی وارد بر زیردریایی را تغییر داد و به این ترتیب، جهت حرکت و عمق زیردریایی را کنترل کرد.
نوآوریها و سیستمهای پیشرفته در زیردریایی
در سالهای اخیر، پیشرفتهای چشمگیری در زمینه مکانیسم شناوری زیردریاییها حاصل شده است. برخی از این نوآوریها عبارتند از استفاده از مواد سبکوزن و مقاوم در ساخت بدنه زیردریایی، باعث کاهش وزن کلی زیردریایی و افزایش کارایی سیستم شناوری میشود. سیستمهای کنترل هوشمند با استفاده از الگوریتمهای پیشرفته، میتوانند به طور خودکار عمق و تعادل زیردریایی را تنظیم کنند و نیاز به دخالت دستی را کاهش دهند. طراحی مخازن بالاست با شکل و ساختار بهینه، میتواند ظرفیت و کارایی آنها را افزایش دهد.



 کیت هواپیمای مدل
کیت هواپیمای مدل کیت آماده پرواز
کیت آماده پرواز موتور هواپیما
موتور هواپیما ملخ هواپیما
ملخ هواپیما رادیو کنترل
رادیو کنترل سیم و کابل
سیم و کابل کانکتور و سوکت
کانکتور و سوکت سوخت هواپیما
سوخت هواپیما باک سوخت
باک سوخت شیلنگ سوخت
شیلنگ سوخت لوازم ساخت بدنه هواپیما
لوازم ساخت بدنه هواپیما چرخ، ارابه فرود و دوبرو
چرخ، ارابه فرود و دوبرو انواع چسب
انواع چسب انواع پیچ و مهره
انواع پیچ و مهره لوازم هواپیمای کشی
لوازم هواپیمای کشی شبیه ساز پرواز هواپیما
شبیه ساز پرواز هواپیما تست و اندازه گیری
تست و اندازه گیری هلیکوپتر کنترلی
هلیکوپتر کنترلی