












کوادکوپتر ها از جدید ترین وسایل پروازی بوده که در سالهای اخیر طرفداران بسیار زیادی پیدا کرده است. این وسایل پروازی به علت قیمت پایین و کارایی بسیار بالا در زمینه های مختلفی مانند کشاورزی، صنعتی، سینمایی، نظامی، سرگرمی و … مورد استفاده قرار گرفته است. شرکت های بسیاری در زمینه ساخت کوادکوپتر ها و مولتی روتور های فعالیت می کنند که از معروف ترین آن ها شرکت DJI می باشد. تمامی کوادکوپتر چه اسباب بازی و چه حرفه ای از موتور الکتریکی استفاده می کنند زیرا کنترل سرعت این موتور ها سریعتر و آسانتر از نوع سوختی هستند. در این مقاله ابتدا به معرفی اجزای اصلی یک کوادکوپتر و در ادامه به بررسی اصول پرواز این وسایل پروازی جذاب خواهیم پرداخت.
معرفی قطعات اصلی یک کوادکوپتر
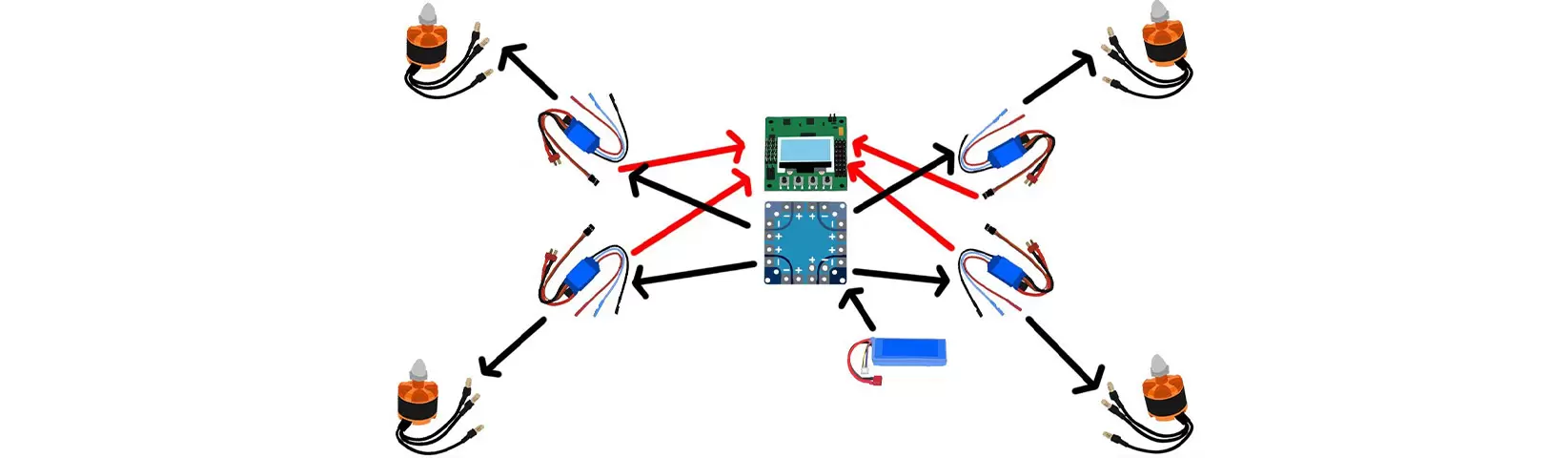
بدنه یا فریم : بدنه یا فریم همان شاسی اصلی یک کوادکوپتر بوده که تمامی قطعات بر روی آن نصب می گردند. فریم کوادکوپتر دارای 4 بازو بوده که موتور ها بر روی آن قرار می گیرند.

موتور های الکتریک : تعداد 4 عدد موتور الکتریکی که معمولا از نوع براشلس هستند بر روی هر بازوی فریم قرار می گیرند. وظیفه موتور ها ایجاد نیروی پیشران برای پرواز کوادکوپتر می باشد.

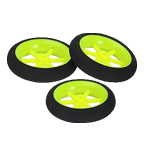
ملخ ها : بر روی شفت هر موتور یک ملخ معمولا از جنس پلاستیکی قرار میگیرد. ملخ ها با توجه به طراحی خاص آن ها در حین چرخش نیرویی رو به بالا ایجاد می کنند.

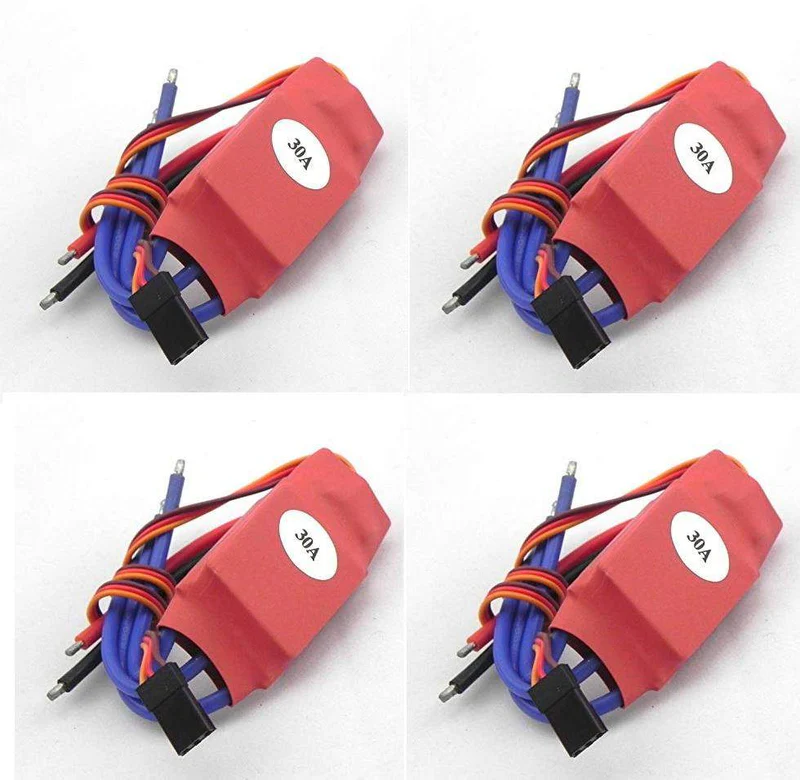
اسپید کنترلر ها : اسپید کنترلر ها وظیفه کنترل سرعت دور موتور را برعهده دارند. هر موتور به وسیله یک اسپید کنترلر تغذیه می شود.
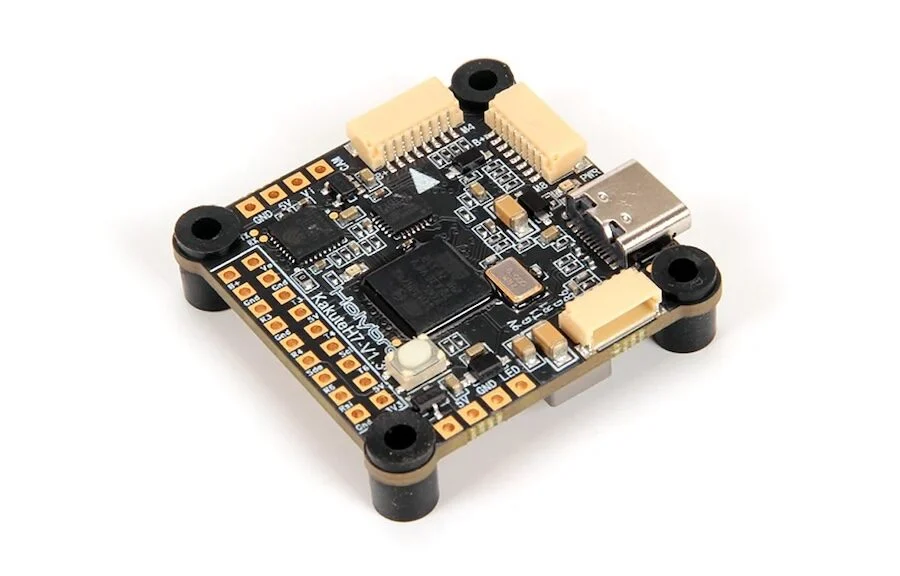
فلایت کنترل : مغز اصلی سیستم یک کوادکوپتر فلایت کنترل می باشد. تمامی فرامین از طریق فلایت کنترل به موتور ها داده می شود.
باتری : همانطور که گفتیم کوادکوپتر ها از انرژی الکتریکی برای پرواز بهره می برند. باتری مورد استفاده در کوادکوپتر ها از نوع لیتیوم پلیمری و بسیار سبک می باشند.

گیرنده و فرستنده : کوادکوپتر نیز مانند هلیکوپتر، هواپیما و ماشین کنترلی از یک سیستم رادیو کنترل برای انتقال فرامین استفاده می کند.

نحوه تغییر مسیر پرواز در یک کوادکوپتر
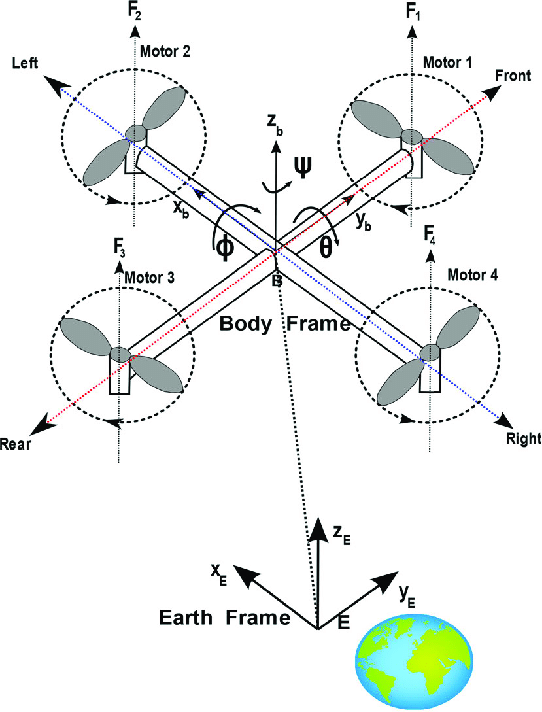
نحوه پرواز کوادکوپتر ها شباهت اندکی با هلیکوپتر ها دارند اما به طور کلی نحوه پروازشان متفاوت است. همانطور که اشاره کردیم هر کوادکوپتر از 4 ملخ برای پرواز استفاده می نماید. تغییر مسیر پرواز در کوادکوپتر به وسیله تغییر در دور موتور آن ها به وجود می آید. همچنین سنسورهایی به منظور پایداری کوادکوپتر در حین پرواز در آن قرار داده شده تا از انحراف آن جلوگیری نمایند. به منظور خنثی سازی اثر گشتاور ناشی از چرخش ملخ های کوادکوپتر می بایست جهت چرخش هر دو زوج ملخی که به صورت ضربدری رو به روی یک دیگر قرار گرفته اند یکی باشد. دو ملخ به صورت ساعت گرد و دو ملخ به صورت پادساعتگرد می چرخند. در صورتی که تمامی 4 ملخ یک کوادکوپتر در یک جهت بچرخند آنگاه فریم کوادکوپتر نیز در جهت عکس چرخش آن ها خواهد چرخید. بنابراین با این روش پایداری پرواز کوادکوپتر نیز تثبیت می شود.
کاهش و افزایش ارتفاع
در این حالت هر چهار موتور کوادکوپتر با هم و به صورت همزمان افزایش و کاهش دور موتور خواهند داشت. با افزایش دور موتور ها طبیعتا نیروی تراست کوادکوپتر بر نیروی وزن آن غلبه کرده و از زمین فاصله می گیرد. در صورتی که دور موتور به اندازه ای باشد که نیروی تراست با نیروی وزن برابر باشد کوادکوپتر در حالت پایدار بین آسمان و زمین ثابت می ماند.
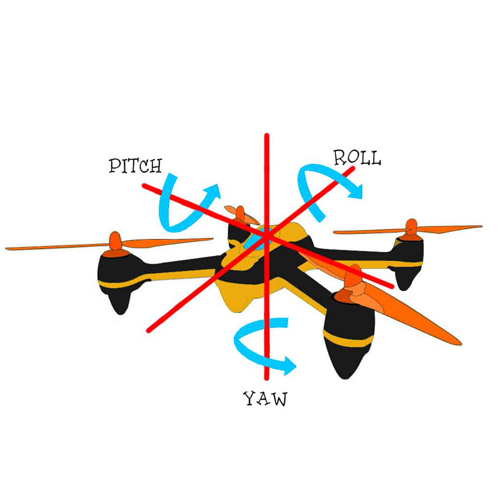
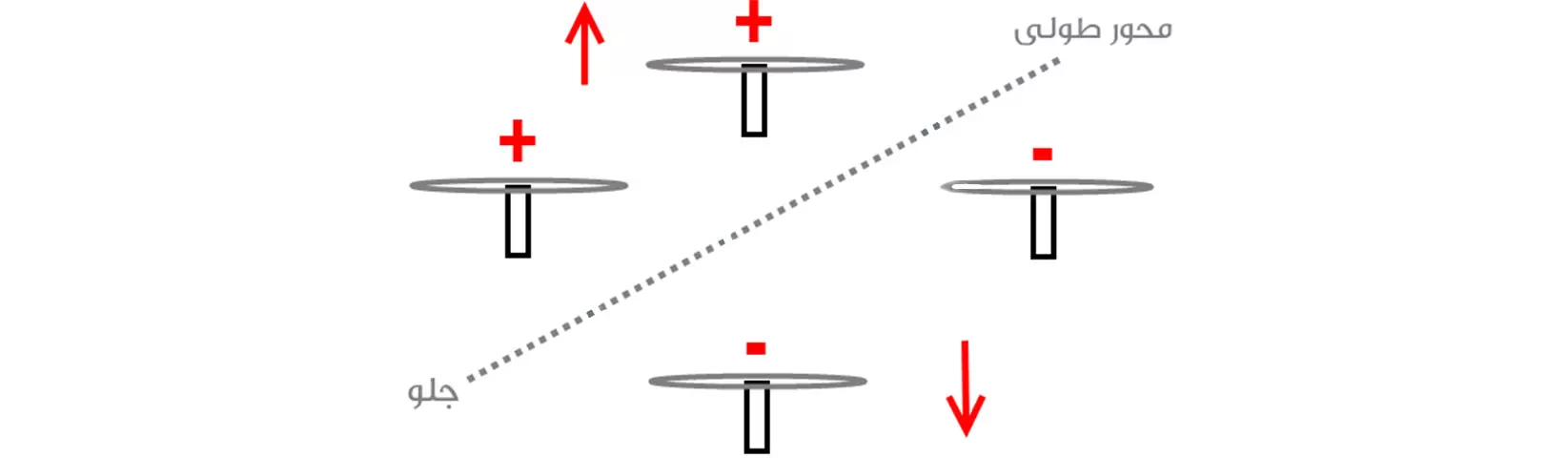
حرکت به جلو و عقب (Pitch)
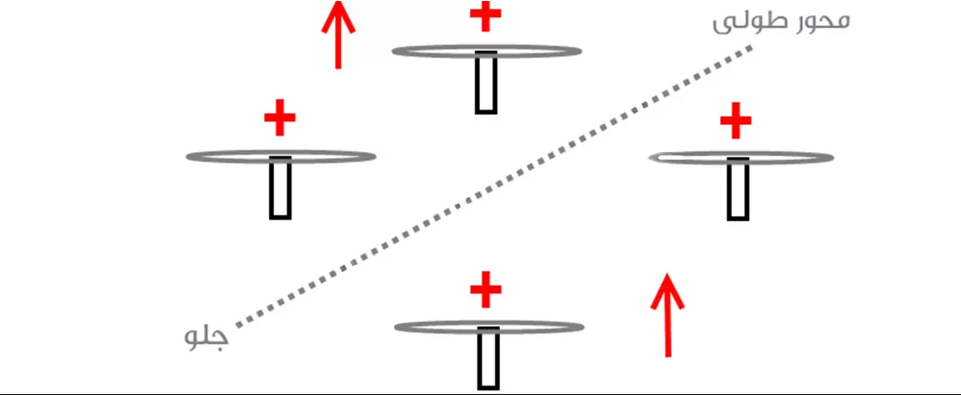
در این حالت دو موتور که در سمت عقب در یک طرف هستند سرعت خود را کمی نسبت به دو موتور طرف دیگر افزایش می دهند و با این افزایش دور موتور قسمت عقب پرنده کمی بالاتر آمده و پرنده رو به جلو متمایل می شود که موجب حرکت کوادکوپتر رو به جلو می گردد. در حالت برعکس هرگاه سرعت دو موتور بخش جلویی بیشتر از دو موتور عقبی شود قسمت جلوی پرنده کمی بالاتر آمده و کوادکوپتر به سمت عقب متمایل می شود و همین امر سبب شده تا پرنده سمت عقب پرواز کند.
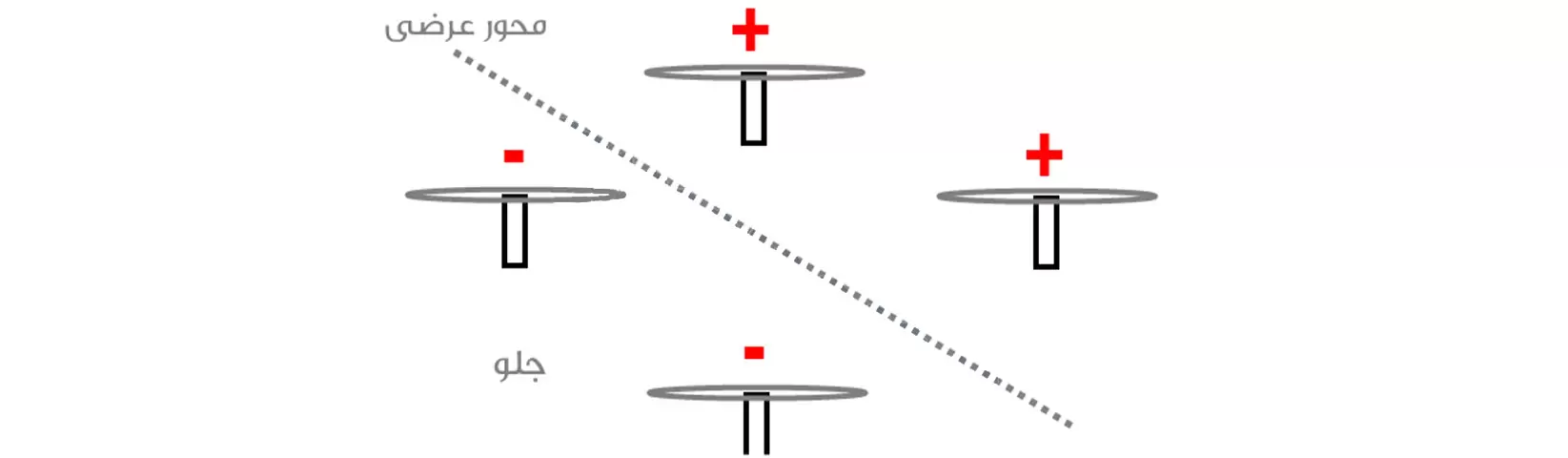
حرکت به چپ و راست (Roll)
دو حالت ذکر شده برای عقب و جلو رفتن برای حرکت به چپ و راست نیز صادق است. در این حالت دو موتور که در سمت چپ در یک طرف هستند سرعت خود را کمی نسبت به دو موتور طرف راست افزایش می دهند و با این افزایش دور موتور قسمت چپ پرنده کمی بالاتر آمده و پرنده رو به راست متمایل می شود که موجب حرکت کوادکوپتر رو به راست می گردد. در حالت برعکس هرگاه سرعت دو موتور بخش راست بیشتر از دو موتور طرف چپ شود قسمت راست پرنده کمی بالاتر آمده و کوادکوپتر به سمت چپ متمایل می شود و همین امر سبب شده تا پرنده سمت چپ پرواز کند.
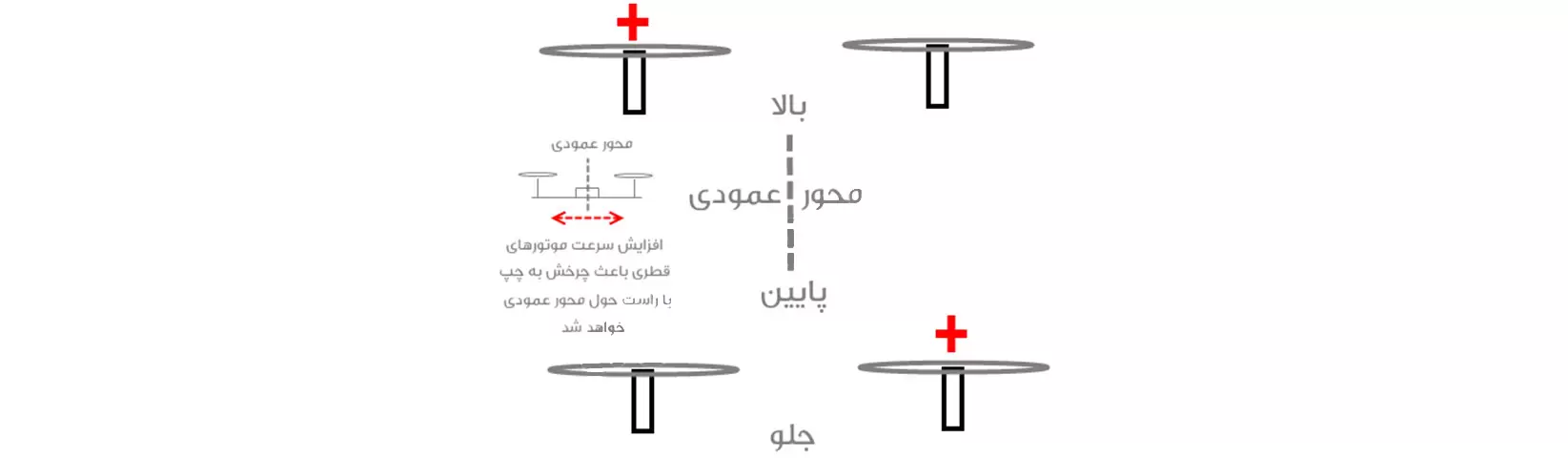
چرخش حول محور Z (Yaw)
برای این که کواد کوپتر به سمت چپ یا راست بچرخد باید دو موتور که به صورت قطری رو به روی هم هستند سرعت خود را افزایش دهند . برای چرخش ساعتگرد (به سمت راست) حول محور عمودی ، باید دو موتوری که پاد ساعتگرد می چرخند افزایش سرعت پیدا کنند و دو موتور دیگر سرعت خود را کاهش دهند . هم چنین برای چرخش پادساعت گرد ( به سمت چپ ) حول محور عمودی ، باید دو موتوری که ساعت گرد می چرخند افزایش سرعت داده و دو موتور دیگر سرعت خود را کاهش دهند . دلیل این که برای چرخش ساعتگرد از موتورهای پادساعتگرد استفاده می شود قانون سوم نیوتن است .