




















روباتها، به عنوان نوآوریهای مهم علم و فناوری، توانستهاند نقش مهمی در زندگی روزمره، صنعت و پژوهش ایفا کنند. یک ربات بهعنوان یک سیستم پیچیده شامل اجزا و بخشهای مختلفی است که به کارکرد صحیح آن کمک میکند. این مقاله به تشریح بخشهای اصلی یک ربات شامل : 1. بدنه 2. موتور و عملگر ها 3. سنسور ها 4. میکروکنترلر 5. منبع قدرت 6. سیستم های ارتباطی 7. نرم افزار ها و الگوریتم ها می پردازد و نقش هر بخش را در عملکرد کلی ربات بررسی میکند.
معرفی بخش های اصلی یک ربات
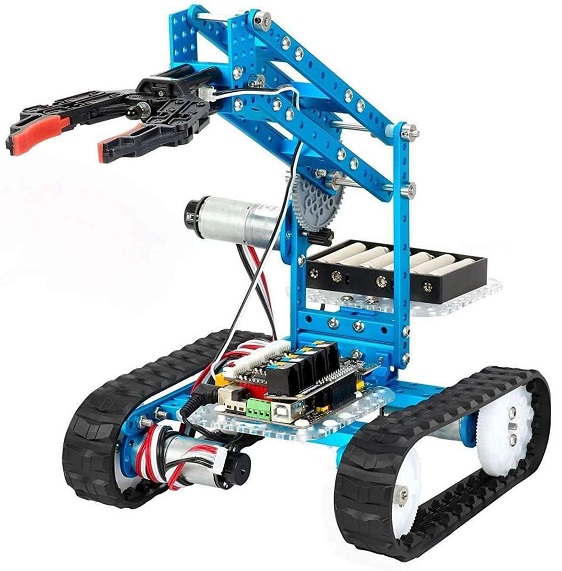
1. بدنه (Chassis)
بدنه یا شاسی ربات میتواند به عنوان ساختار اصلی آن در نظر گرفته شود. این بخش شامل تمام اجزای دیگر است و باید بهگونهای طراحی شود که توانایی تحمل وزن و فشار اعمالی را داشته باشد. بدنه معمولاً از موادی مانند آلومینیوم، فولاد یا پلاستیک ساخته میشود. طرح بدنه میتواند بسته به کاربرد ربات متغیر باشد، به عنوان مثال، رباتهای صنعتی ممکن است بدنهای سنگین و مقاوم داشته باشند، در حالی که رباتهای خانگی میتوانند بدنهای سبک و کوچک داشته باشند.

2. موتور و عملگرها (Actuators)
موتورها و عملگرها به عنوان محرکهای ربات عمل میکنند و وظیفه تبدیل انرژی الکتریکی به حرکت فیزیکی را دارند. محبوبترین انواع موتورها شامل موتورهای DC، موتورهای سروو و موتورهای استپر هستند. موتورهای DC برای حرکتهای ساده و پیوسته مناسباند، در حالی که موتورهای سروو با دقت بیشتری میتوانند موقعیت مشخصی را کنترل کنند. موتورهای استپر هم برای کنترل حرکتهای دقیق و گام به گام مناسب هستند. عملگرها نیز شامل قطعاتی مانند چرخها، بازوها و سایر اجزای حرکتی هستند که به ربات اجازه میدهند تا به طور دقیق حرکت کند و به محیط پاسخ دهد.

3. سیستمهای سنسوری (Sensor Systems)
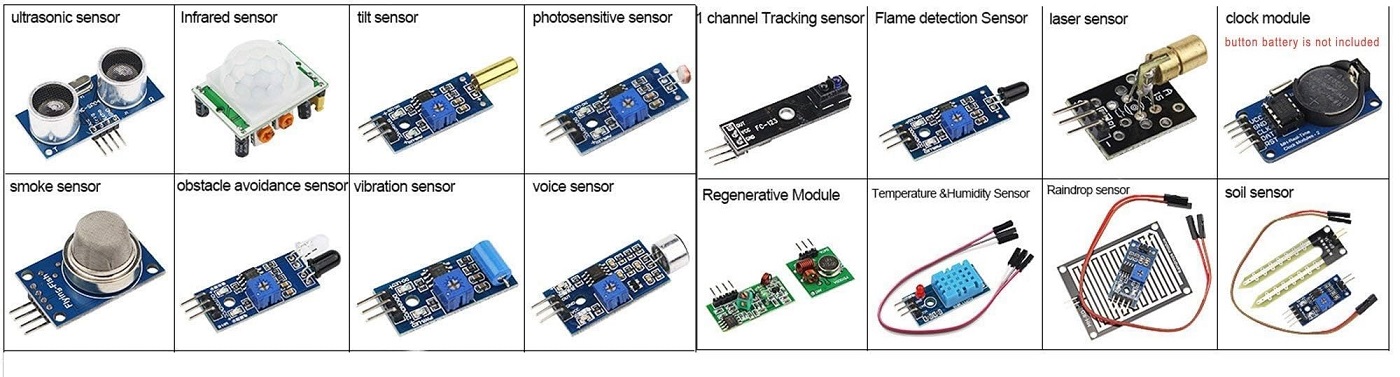
سنسورها اجزایی هستند که به ربات اجازه میدهند تا اطلاعاتی از محیط اطراف خود جمعآوری کند. این اطلاعات میتواند شامل موقعیت، فاصله، دما، نور، صدا و حتی ترکیب شیمیایی باشد. این سنسورها به ربات کمک میکنند تا با محیط تعامل کند و تصمیمات بهتری بگیرد. برخی از انواع سنسورها عبارتند از:
- سنسورهای اولتراسونیک: برای اندازهگیری فاصله تا اشیاء.
- سنسورهای مادون قرمز: برای اندازهگیری دما یا تشخیص حرکت.
- سنسورهای خط: برای دنبال کردن مسیر مشخص بر روی زمین.
- سنسورهای تشخیص لمس: برای تشخیص وجود جسمی در نزدیکی ربات.
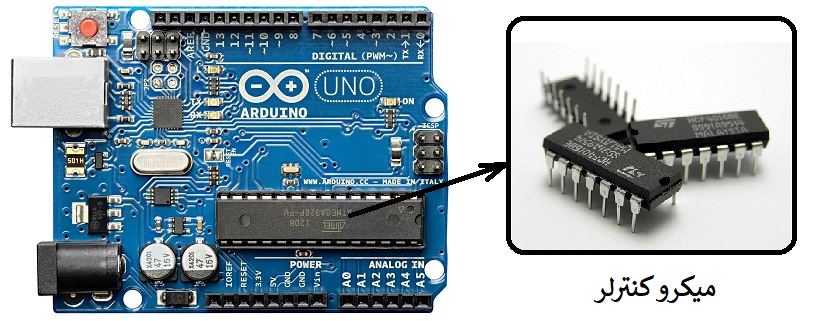
4. میکروکنترلر (Microcontroller)
میکروکنترلر بهعنوان مغز ربات عمل میکند و وظیفه پردازش اطلاعات دریافتی از سنسورها و ارسال دستور به موتورها را برعهده دارد. میکروکنترلرها میتوانند برنامهریزی شده و با زبانهای برنامهنویسی مختلفی مانند C، C++ یا Python کنترل شوند. انتخاب میکروکنترلر مناسب برای ربات بستگی به نیازهای عملیاتی و پیچیدگی پروژه دارد. در واقع میکروکنترلر اطلاعات جمع آوری شده را از طریق سنسور دریافت و سپس پردازش نموده و پس از تصمیم گیری، دستور مورد نظر را به موتور ارسال می نماید. برای مثال یک ربات ماشین در حال حرکت پس از رسیدن به یک مانع از طریق سنسور اولتراسونیک متوجه مانع شده و میکرو کنترلر به موتور دستور توقف را صادر می کند.
5. منبع قدرت (Power Supply)
منبع قدرت یکی از اجزای حیاتی رباتها است. این بخش انرژی لازم برای کارکرد موتورها، سنسورها و دیگر اجزاء را تامین میکند. منابع قدرت میتوانند شامل باتریها، انرژی خورشیدی، یا منابع نیروی دیگری باشند. انتخاب منبع قدرت مناسب بسته به نوع ربات و نیاز انرژی آن متفاوت است. باتریهای لیتیوم یونی بهعنوان منبع انرژی متداول در رباتیک شناخته میشوند به دلیل ظرفیت بالا و زمان کارکرد طولانی.

6. سیستمهای ارتباطی (Communication Systems)
رباتها به سیستمهای ارتباطی نیاز دارند تا اطلاعات را با دیگر سیستمها یا کاربرها تبادل کنند. این ارتباط میتواند بهصورت بیسیم (Wi-Fi، بلوتوث) یا با سیم (USB، RS-232) باشد. سیستمهای ارتباطی این امکان را فراهم میکنند که ربات با کاربران یا سایر رباتها ارتباط برقرار کرده و دادهها را در زمان واقعی ارسال و دریافت کند.
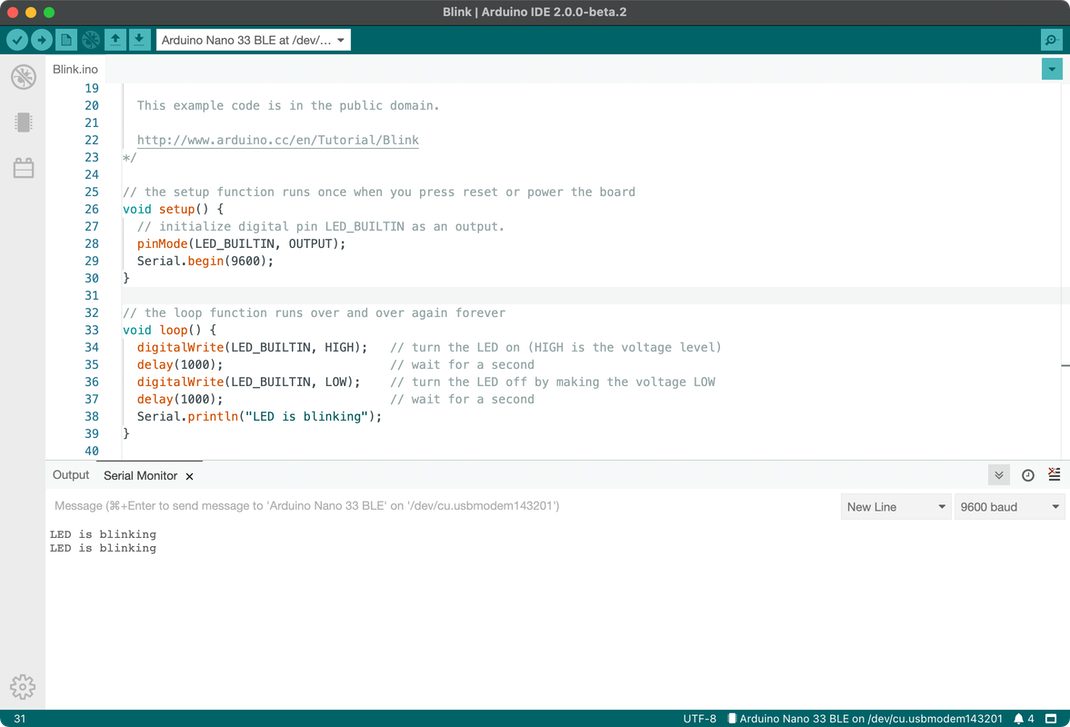
7. نرمافزار و الگوریتمها (Software and Algorithms)
نرمافزارها و الگوریتمها قسمتهای کلیدی در عملکرد رباتها هستند. این نرمافزارها قابلیتهای مختلفی از جمله کنترل حرکت، پردازش اطلاعات سنسورها و تصمیمگیری را فراهم میکنند. برنامهنویسان میتوانند الگوریتمهای مختلفی را بهمنظور ایجاد رفتارهای پیچیده در رباتها پیادهسازی کنند. این برنامهها همچنین میتوانند شامل الگوریتمهای یادگیری ماشین باشند تا به ربات در تطبیق با محیطها و شرایط جدید کمک کنند. در واقع از طریق برنامه نویسی شما به ربات اعلام می کنید که چطور فکر کند، چطور تصمیم بگیرد و چطور عمل کند. کد های نوشته شده در نرم افزار های مربوطه به میکروکنترلر انتقال پیدا کرده و در اصطلاح میکروکنترلر پروگرام می گردد.
نتیجهگیری
روباتها به یک ترکیب پیچیده از اجزا و بخشها وابستهاند که هر کدام در عملکرد کلی آن نقش مهمی ایفا میکنند. شناخت این بخشها و درک چگونگی همکاری آنها با یکدیگر نه تنها به مهندسان و پژوهشگران کمک میکند تا رباتهای بهتری طراحی کنند، بلکه برای علاقهمندان به رباتیک و دانشآموزان نیز مفید است. در عصر حاضر، با پیشرفت فناوری، استفاده از رباتها در حوزههای مختلف به طور چشمگیری در حال گسترش است و آشنایی با این بخشها میتواند راهی به سوی نوآوریهای جدید باشد.












 کیت هواپیمای مدل
کیت هواپیمای مدل کیت آماده پرواز
کیت آماده پرواز کیت بدنه خالی
کیت بدنه خالی کیت ساختنی
کیت ساختنی موتور هواپیما
موتور هواپیما موتور سوختی
موتور سوختی ملخ هواپیما
ملخ هواپیما ملخ سوختی
ملخ سوختی ملخ الکتریک
ملخ الکتریک ملخ هواپیمای کشی
ملخ هواپیمای کشی لوازم الکترونیکی هواپیما
لوازم الکترونیکی هواپیما رادیو کنترل
رادیو کنترل باتری هواپیما و شارژر
باتری هواپیما و شارژر سروو موتور و متعلقات
سروو موتور و متعلقات سیم و کابل
سیم و کابل کانکتور و سوکت
کانکتور و سوکت سوخت هواپیما
سوخت هواپیما سوخت الکلی
سوخت الکلی سوخت بنزینی
سوخت بنزینی سیستم سوخت رسانی
سیستم سوخت رسانی باک سوخت
باک سوخت شیلنگ سوخت
شیلنگ سوخت سایر متعلقات باک
سایر متعلقات باک لوازم ساخت بدنه هواپیما
لوازم ساخت بدنه هواپیما بالسا، تخته سه لایی و فوم
بالسا، تخته سه لایی و فوم کاور بدنه و برچسب
کاور بدنه و برچسب چرخ، ارابه فرود و دوبرو
چرخ، ارابه فرود و دوبرو اسپینر و کوپلینگ
اسپینر و کوپلینگ لولا، شیپوری و کش بال
لولا، شیپوری و کش بال لینک، سرلینک و استاپر لینک
لینک، سرلینک و استاپر لینک انواع چسب
انواع چسب لوله و صفحات کربن
لوله و صفحات کربن انواع پیچ و مهره
انواع پیچ و مهره لوازم هواپیمای کشی
لوازم هواپیمای کشی شبیه ساز پرواز هواپیما
شبیه ساز پرواز هواپیما ابزار ساخت هواپیما
ابزار ساخت هواپیما پرداخت و تزئین بدنه
پرداخت و تزئین بدنه طول، زاویه و ضخامت
طول، زاویه و ضخامت سایر ابزارها
سایر ابزارها ابزارهای تست، تعمیر و نگه داری
ابزارهای تست، تعمیر و نگه داری راه اندازی موتور سوختی
راه اندازی موتور سوختی تست و اندازه گیری
تست و اندازه گیری مونتاژ و لحیم کاری
مونتاژ و لحیم کاری نظم دهنده، نظافت و ایمنی
نظم دهنده، نظافت و ایمنی هلیکوپتر کنترلی
هلیکوپتر کنترلی هلیکوپتر اسباب بازی
هلیکوپتر اسباب بازی قطعات یدکی
قطعات یدکی هلیکوپتر حرفه ای الکتریک
هلیکوپتر حرفه ای الکتریک قطعات یدکی
قطعات یدکی هلیکوپتر حرفه ای سوختی
هلیکوپتر حرفه ای سوختی کوادکوپتر
کوادکوپتر کوادکوپتر اسباب بازی
کوادکوپتر اسباب بازی قطعات یدکی
قطعات یدکی قطعات یدکی
قطعات یدکی ماشین کنترلی اسباب بازی
ماشین کنترلی اسباب بازی ماشین آلات راهسازی
ماشین آلات راهسازی سایر انواع ماشین
سایر انواع ماشین قطعات یدکی
قطعات یدکی ماشین حرفه ای سوختی
ماشین حرفه ای سوختی ماشین کنترلی آفرود
ماشین کنترلی آفرود قطعات یدکی
قطعات یدکی ماشین حرفه ای الکتریک
ماشین حرفه ای الکتریک ماشین کنترلی آفرود
ماشین کنترلی آفرود قطعات یدکی
قطعات یدکی