
 کیت اماده پرواز
کیت اماده پرواز
 کیت ساختنی
کیت ساختنی
 کیت بدنه خالی
کیت بدنه خالی
 موتور الکتریک
موتور الکتریک
 موتور سوختی
موتور سوختی
 ملخ الکتریک
ملخ الکتریک
 ملخ سوختی
ملخ سوختی
 ملخ هواپیمای کشی
ملخ هواپیمای کشی
 سوخت الکلی
سوخت الکلی
 سوخت بنزینی
سوخت بنزینی
 اسپید کنترل
اسپید کنترل
 رادیو کنترل
رادیو کنترل
 باتری هواپیما و شارژر
باتری هواپیما و شارژر
 سروو موتور
سروو موتور
 سیم و کابل
سیم و کابل
 کانکتور و سوکت
کانکتور و سوکت
 باک سوخت
باک سوخت
 شیلنگ سوخت
شیلنگ سوخت
 متعلقات باک
متعلقات باک
 کنسول شبیه ساز
کنسول شبیه ساز
 نرم افزار شبیه ساز
نرم افزار شبیه ساز
 کابل رابط
کابل رابط
 بالسا، تخته سه لایی و فوم
بالسا، تخته سه لایی و فوم
 کاور حرارتی و برچسب
کاور حرارتی و برچسب
 چرخ، ارابه فرود و دوبرو
چرخ، ارابه فرود و دوبرو
 اسپینر و کوپلینگ
اسپینر و کوپلینگ
 لولا، شیپوری و کش بال
لولا، شیپوری و کش بال
 لینک، سرلینک و استاپرلینک
لینک، سرلینک و استاپرلینک
 لوله و صفحات کربن
لوله و صفحات کربن
 چسب
چسب
 کش FAI
کش FAI
 شفت موتور
شفت موتور
 تراست برینگ
تراست برینگ
 تیشو و ایزودوپ
تیشو و ایزودوپ
 چرخ و ارابه فرود
چرخ و ارابه فرود
 شارژر کوک کش
شارژر کوک کش
 برش، خمکاری و سوراخکاری
برش، خمکاری و سوراخکاری
 پرداخت و تزئین بدنه
پرداخت و تزئین بدنه
 طول، زاویه و ضخامت
طول، زاویه و ضخامت
 سایر ابزار ها
سایر ابزار ها
 راه اندازی موتور سوختی
راه اندازی موتور سوختی
 مونتاژ و لحیم کاری
مونتاژ و لحیم کاری
 تست و اندازه گیری
تست و اندازه گیری
 نظم دهنده، نظافت و ایمنی
نظم دهنده، نظافت و ایمنی

 هلیکوپتر اسباب بازی
هلیکوپتر اسباب بازی
 قطعات یدکی
قطعات یدکی
 هلیکوپتر الکتریک
هلیکوپتر الکتریک
 قطعات یدکی
قطعات یدکی
 هلیکوپتر سوختی
هلیکوپتر سوختی
 نرم افزار شبیه ساز
نرم افزار شبیه ساز

 کوادکوپتر اسباب بازی
کوادکوپتر اسباب بازی
 قطعات یدکی
قطعات یدکی
 کوادکوپتر حرفه ای
کوادکوپتر حرفه ای
 قطعات یدکی
قطعات یدکی

 ماشین کنترلی آنرود
ماشین کنترلی آنرود
 ماشین آلات راهسازی
ماشین آلات راهسازی
 سایر انواع ماشین
سایر انواع ماشین
 قطعات یدکی
قطعات یدکی
 ماشین کنترلی آنرود
ماشین کنترلی آنرود
 ماشین کنترلی آفرود
ماشین کنترلی آفرود
 قطعات یدکی
قطعات یدکی
 ماشین کنترلی آنرود
ماشین کنترلی آنرود
 ماشین کنترلی آفرود
ماشین کنترلی آفرود
 قطعات یدکی
قطعات یدکی
 سوخت نیترو
سوخت نیترو


















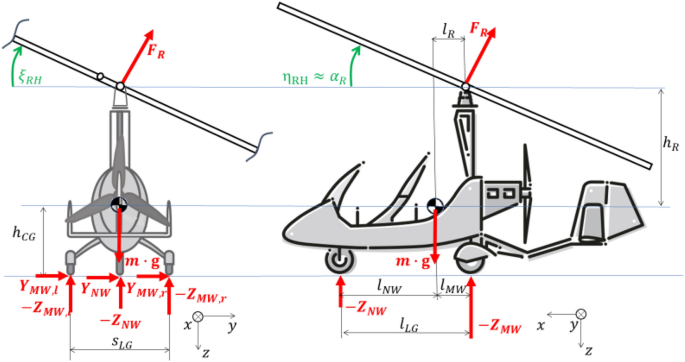
جایروکوپترها، یا جایروپلن، هواگردهایی هستند که با استفاده از یک روتور چرخان غیر موتوردار برای ایجاد بالابری و یک پیشرانه برای پیشروی، پرواز میکنند. برخلاف هلیکوپترها که روتور آنها توسط موتور به طور مستقیم به چرخش در میآید، روتور جایروکوپتر در اثر عبور هوا و اثر آیرودینامیکی حرکت رو به جلو به چرخش درآمده و بالابری ایجاد میکند. درک اصول پرواز جایروکوپتر نیازمند فهم مفاهیم آیرودینامیک، دینامیک چرخش و اثر ژیروسکوپی است. در نتیجه، پرواز جایروکوپتر بر پایه اصول آیرودینامیک، دینامیک چرخش، اثر ژیروسکوپی و سیستمهای کنترل پیشرفته استوار است. درک این اصول برای خلبانان ضروری است تا بتوانند به طور ایمن و مؤثر با این هواگرد پرواز کنند. این مقاله به تشریح این اصول و نحوه عملکرد جایروکوپتر می پردازد.
آیرودینامیک پرواز جایروکوپتر
روتور جایروکوپتر، تشکیل شده از چندین پره، نقش اساسی در ایجاد بالابری دارد. پرههای روتور، پروفیلهای آیرودینامیکی دارند، مشابه بالهای هواپیما. هنگامی که هوا با سرعت از روی سطح بالایی پره میگذرد، فشار کمتر و در سطح پایینی پره، فشار بیشتر میشود. این اختلاف فشار، نیروی بالابری را ایجاد میکند. در جایروکوپتر، این نیروی بالابری به خاطر حرکت رو به جلوی هواگرد و چرخش روتور به وجود میآید. به عبارت دیگر، حرکت جایروکوپتر باعث چرخش روتور میشود و این چرخش، بالابری مورد نیاز را ایجاد میکند.
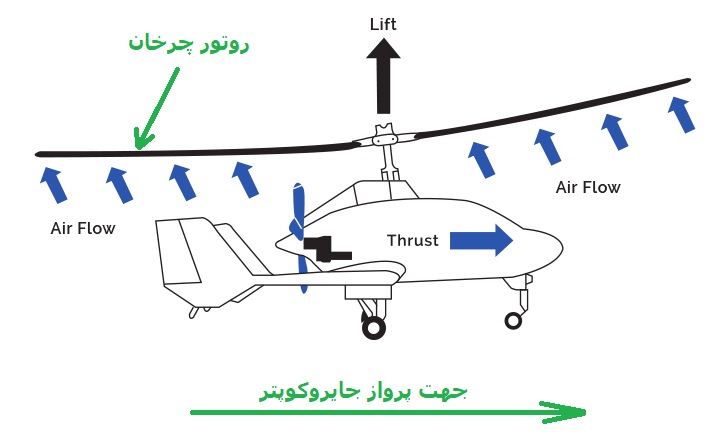
چرخش روتور یکی از مهمترین اصول پرواز جایروکوپتر است. برخلاف تصور عمومی، موتور جایروکوپتر به طور مستقیم روتور را به چرخش در نمیآورد. موتور وظیفه ایجاد نیروی پیشران برای حرکت جایروکوپتر به جلو را به عهده دارد. این حرکت رو به جلو، جریان هوا را به سمت پرههای روتور هدایت میکند. با عبور هوا از روی پرهها، نیروی آیرودینامیکی ایجاد شده و پرهها شروع به چرخش میکنند. سرعت چرخش روتور با سرعت پیشروی جایروکوپتر رابطه مستقیم دارد. هرچه سرعت پیشروی بیشتر باشد، سرعت چرخش روتور نیز بیشتر خواهد بود و بالابری بیشتری تولید میشود. این به این معنی است که برای اوج گیری، جایروکوپتر باید به جلو حرکت کند تا روتور به چرخش درآمده و بالابری ایجاد شود.

روتور جایروکوپتر، به عنوان یک ژیروسکوپ، خاصیت مقاومت در برابر تغییر جهت چرخش خود را دارد. این اثر ژیروسکوپی باعث پایداری جایروکوپتر در هوا میشود. هنگامی که خلبان میخواهد جهت جایروکوپتر را تغییر دهد، از طریق سیستم کنترل، زاویه پرههای روتور تغییر داده میشود. این تغییر زاویه، باعث ایجاد گشتاورهایی میشود که جایروکوپتر را به سمت مورد نظر هدایت میکند. اثر ژیروسکوپی، باعث میشود که این تغییرات جهت، به آرامی و با ثبات انجام شوند و از حرکات ناگهانی و خطرناک جلوگیری شود.
کنترل پرواز در جایروکوپتر
کنترل پرواز در جایروکوپتر، از طریق سیستم کنترل سکان، اهرم کنترل و پدالهای هدایت انجام میشود. سکان، کنترل حرکت دورانی (Yaw) جایروکوپتر را برعهده دارد. اهرم کنترل، کنترل حرکت بالا و پایین (Pitch) و حرکت چپ و راست (Roll) جایروکوپتر را انجام میدهد. پدالها، به طور غیر مستقیم و از طریق سکان، کنترل جهتگیری جایروکوپتر را امکانپذیر میکنند. خلبان با استفاده از این سیستم کنترل، میتواند جایروکوپتر را به طور دقیق هدایت کرده و به ارتفاع و سرعت مورد نظر برسد. فرود جایروکوپتر، مشابه فرود هلیکوپتر نیست. در جایروکوپتر، بهدلیل اثر ژیروسکوپی روتور، نیروی بالابری تا سرعت های پایینتر حفظ میشود. خلبان با کاهش سرعت پیشروی، به تدریج سرعت چرخش روتور را کاهش میدهد تا جایروکوپتر به آرامی به زمین بنشیند. در صورت از دست رفتن قدرت موتور، روتور به چرخش خود ادامه میدهد و مانند یک چتر نجات عمل میکند و فرود ایمن را امکانپذیر میکند.
فازهای پرواز جایروکوپتر
پرواز جایروکوپتر به طور کلی به سه فاز تقسیم میشود:
-
چرخش روتور: قبل از شروع به پرواز، خلبان با استفاده از نیروی باد، روتور را به چرخش در میآورد. به این عمل Auto Rotation گفته میشود. برای این کار، هواگرد به آرامی در خلاف جهت باد حرکت میکند تا روتور به تدریج به چرخش درآمده و به سرعت مورد نظر برسد.
-
اوجگیری: برای اوج گیری، خلبان با استفاده از نیروی موتور و کنترل سیستمهای پرواز، جایروکوپتر را به جلو حرکت میدهد. با افزایش سرعت پیشروی، چرخش روتور افزایش یافته و در نهایت بالابری کافی برای بلند شدن از زمین ایجاد میشود.
-
پرواز پایدار: در حالت پرواز پایدار، روتور با سرعت ثابتی میچرخد و جایروکوپتر با سرعت و ارتفاع ثابت به پرواز خود ادامه میدهد. خلبان با استفاده از سیستمهای کنترل، ارتفاع و سرعت را کنترل میکند.
تفاوت جایرو کوپتر با هلیکوپتر
جایروکوپترها با هلیکوپترها تفاوتهای اساسی دارند. در هلیکوپتر، روتور توسط موتور به طور مستقیم به چرخش در میآید و به طور مستقل از سرعت پیشروی هواگرد، بالابری ایجاد میکند. در جایروکوپتر، روتور به طور غیرمستقیم و با استفاده از حرکت پیشروی به چرخش در میآید. این تفاوت، در طراحی، عملکرد و روش کنترل این دو هواگرد تأثیر قابل توجهی دارد.



 کیت هواپیمای مدل
کیت هواپیمای مدل کیت آماده پرواز
کیت آماده پرواز موتور هواپیما
موتور هواپیما ملخ هواپیما
ملخ هواپیما رادیو کنترل
رادیو کنترل سیم و کابل
سیم و کابل کانکتور و سوکت
کانکتور و سوکت سوخت هواپیما
سوخت هواپیما باک سوخت
باک سوخت شیلنگ سوخت
شیلنگ سوخت لوازم ساخت بدنه هواپیما
لوازم ساخت بدنه هواپیما چرخ، ارابه فرود و دوبرو
چرخ، ارابه فرود و دوبرو انواع چسب
انواع چسب انواع پیچ و مهره
انواع پیچ و مهره لوازم هواپیمای کشی
لوازم هواپیمای کشی شبیه ساز پرواز هواپیما
شبیه ساز پرواز هواپیما تست و اندازه گیری
تست و اندازه گیری هلیکوپتر کنترلی
هلیکوپتر کنترلی